Restoring Amiga 3000T - Part 6 - Cyberstorm mk2 040 CPU card
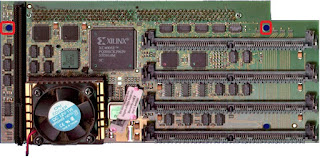
The Cyberstorm board is working fine and fasssstttt, but on Amiga 3000T has 2 problems. Cyberstorm and motherboard are vertical mounted and the 2 plastic spacers provided are too weak to bring the boards connected. I solve the issue using 2 Cyanoacrylate glue drops (look the red boxes below). Cyberstorm’s 68040 CPU is covered by the hard disk’s chassis and the air flow is capped. I cut a boxed window on the chassis to allow air flow.



